![]()
![]()
![]()
![]()
![]()
We start with the premise that nearly all transport will be carried by a single network of guideways carrying a variety of types of traffic. Not all parts of the guideway will be accessible to all types of traffic some most vehicles that can travel on most parts of the guideway. All movement on the network will be automated.
The guideway network will be complex and extensive and the cost of the guideway itself will be the largest component of the total cost of the system. The density of traffic on some sections will be the maximum possible but a considerable proportion of the installed length, eg extending into the suburbs, will need to be viable with rather low traffic.
The visual intrusivness of overhead structures has emerged as a major obstacle, so the design must minimise the bulk and height of the overhead structure and be attractive for deployment underground. The design should also make it easy for stations to be at grade and with the minimum bulk
The system needs to have:
We propose that the only specified feature common to all types of guideway will be a pair of running surfaces:
Part of this specification will be the surface smoothness of the tracks and the maximum load.
Vehicle wheels will have low loss elastomer tyres and will be mostly powered by electric hub motors for maximum drive efficiency and minimum noise.
We anticipate that a large proportion of the installed length of guideway will be in suburban areas. It will at grade and there will be low speed, light traffic. Extremely low cost guideway will be used, with a simple barrier:

A greater degree of constraint and protection of the running surfaces from the weather will be obtained by adding a shield over the top of the wheels. It would be essential for overhead guideways and in areas prone to hurricanes or earthquakes.
For overhead guideways the strength members can be either side of the vehicle:
The stiffness of this support structure is greater than typical overhead or supported guideway and the centre of gravity of the vehicle will be nearer to the centre of support. This means that less material will be needed to achieve sufficient structural stiffness and high resonant frequency.
Ulimately the idea is for all types of vehicle to use the same running surface, however an extra running surface could be put between these to allow other types of vehicle to pass along the the same path.
Note that mechanical guidance below the level of the tracks is not allowed because they make complex junctions expensive and inflexible. We want to avoid the sort of structure shown in the next two figures:
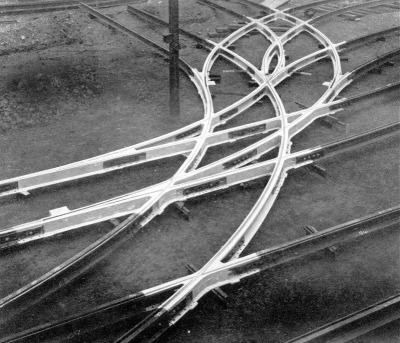
Tram track junctions ready for installation

Instead we will have a simple flat surface over which vehicles can navigate as required. Steerable wheels provide virtual flanges.